企业免费推广平台
上海科佑自动化科技有限公司从事自动化科技、机械设备领域内的技术咨询、技术服务、技术开发、技术转让,仪器仪表、机电设备、机械设备
159****5589

原理&结构:
导波雷达是基于时间行程原理的测量仪表,雷达波以光速运行,运行时间可以通过电子部件被转 换成物位信号。探头发出高频脉冲并沿缆式或杆式探头传导,当脉冲遇到物料表面时反射回来被仪表 内的接收器接收,并将距离信号转化为物位信号。
输入:
反射的脉冲信号沿缆式或杆式探头传导至仪表电子线路部分,微处理器对此信号进行处理,识别 出微波脉冲在物料表面所产生的回波。正确的回波信号识别由智能软件完成,距离物料表面的距离D与 脉冲的时间行程T成正比:D=C×T/2 其中C为光速因空罐的距离E已知,则物位L为: L=E-D
输出:
通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动 使仪表适应测量环境。对应于4…20mA输出。
测量范围:
F----测量范围 E----空罐距离 B----顶部盲区
H----探头到罐壁的*小距离 顶部盲区是指物料zui高料面与测量参考点之间的*小距离。 底部盲区是指缆绳zui底部附近无法精确测量的一段距离。 顶部盲区和底部盲区之间是有效测量距离。
注意:
只有物料处于顶部盲区和底部盲区之间时,才能保证罐内物位的可靠测量。
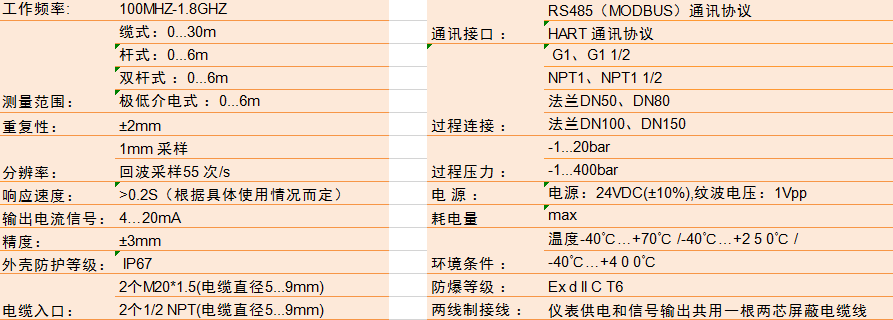
技术参数:
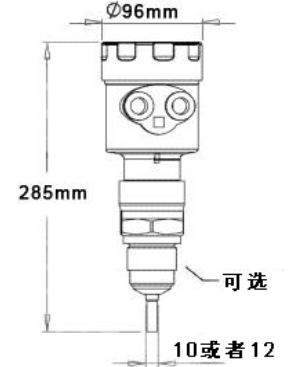
尺寸图(单位mm)

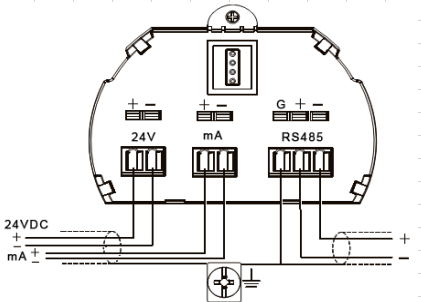
两线制接线图
四线制接线图
RR30A型-线缆式:

RR30B型-杆式:

RR30C型-双杆式:

RR30C1型-低介电式:

安装方法:
合理安装能确保仪表长期可靠而精确的测量仪表可采用螺纹连接,螺纹的长度不要超 过150mm,还可以采用在短管上安装。安 装短管直径在2″至6″则安装短管高度应≤150mm,若安装于较长的短管上,应底部固定缆式探头或选用对中支架以避免缆式探头与短管末端接触。



本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
上海科佑自动化科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

